

近日,機械與電子工程學院苑進教授團隊在《Computers and Electronics in Agriculture》在線發表了題為“Development of a novel pull-cutting end-effector for ex-situ robotic harvesting of white asparagus based on MBD-DEM coupling simulation”的研究論文。張萍博士為該論文的第一作者,苑進教授為該論文的通訊作者。
蘆筍富含營養且具有抗癌保健功效,被譽為“蔬菜之王”,目前國際上白蘆筍采收仍以人工作業為主,成本高、費時費力。白蘆筍是我國出口額最大的單一蔬菜品種,攻克白蘆筍采收技術瓶頸,對提高蘆筍產業的國際競爭力意義重大。
蘆筍生長在地下,且收獲空間有限,對采收模式和末端執行器的設計提出了極高的要求。該研究受“行船中下網撈魚”啟發,考慮采收過程與機器行走的運動協同,首次提出了不停車、非原位、網撈采收新模式,突破國外“不停車+原位采收+運動補償”的采收方案弊端,實現了從原位采收到非原位采收的跨越,從源頭上解決了機器行走與原位采收的動靜矛盾,為機器人的選擇性高速采收奠定了基礎。
針對蘆筍脆嫩多汁、易斷易損傷的特點,以及土中作業過程中的一些參數難以有效測量的難點,該研究創新設計了剛柔耦合拉切末端執行器(PCEE),通過前行入土、拉切、出土、拋射4個子過程實現高效、低損傷收獲,整個采收過程筍芽由土壤包裹損傷概率極小。通過建立PCEE-土壤-筍模型,利用雙向耦合MBD-DEM (Multi-Body Dynamics and Discrete Element Method,多體動力學與離散單元法)分析采收過程,明確了高速采收過程中末端執行器的構型變化以及部件-土-筍之間的互作耦合機理和粒子的運動規律,對末端執行器的結構設計、作業參數優化、采收性能提升具有重要的理論依據。
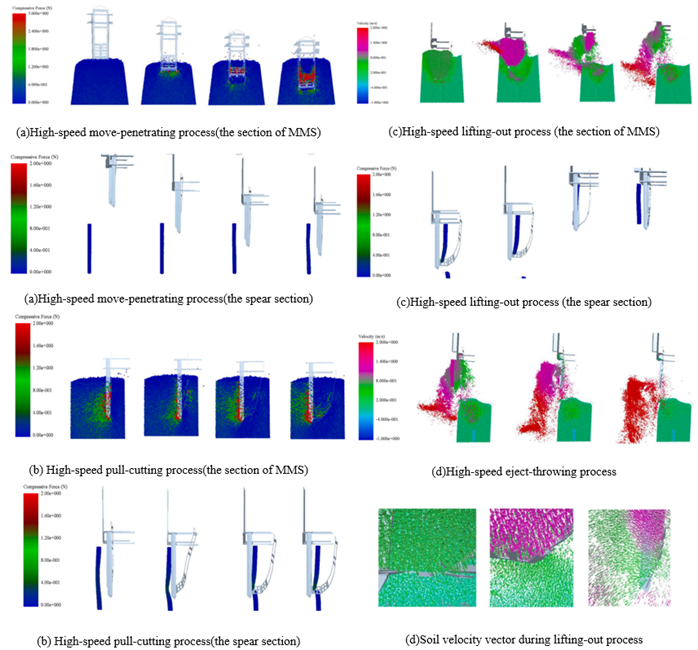
圖1. 基于MBD-DEM的采收過程仿真分析
該研究構建了網撈采收機器人平臺,并進行了室內與田間采收試驗,對采收過程進行了驗證。試驗結果驗證了所提出的采收模式和末端執行器的結構在白蘆筍選擇性收獲機器人中的有效性和可行性,突破了筍芽高速采收的瓶頸問題,為選擇性收獲和觸土部件創新設計提供新思路新方法,具有重要的學術意義和工程價值。
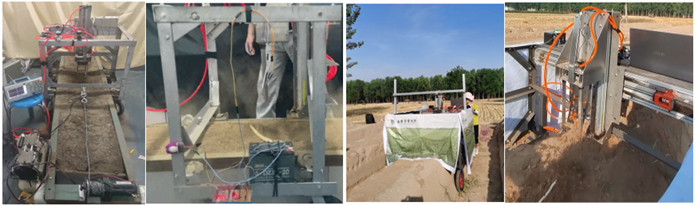
圖2. PCEE室內與田間采收試驗
該研究得到了國家自然科學基金的資助。
論文鏈接:https://doi.org/10.1016/j.compag.2023.107641
編 輯:萬 千
審 核:賈 波





