

近日,機械與電子工程學院苑進教授團隊在《Computers and Electronics in Agriculture》在線發表了題為“A novel lightweight model HGCA-YOLO: Application to recognition of invisible spears for white asparagus robotic harvesting”的研究論文。博士研究生張萍為該論文的第一作者,苑進教授為該論文的通訊作者。
蘆筍富含營養且具有抗癌保健功效,被譽為“蔬菜之王”,目前國際上白蘆筍采收仍以人工作業為主,是一項高度重復和密集型的任務。白蘆筍是我國出口額最大的單一蔬菜品種,攻克白蘆筍采收技術瓶頸,實現自動化采收對蘆筍,對提高蘆筍產業的國際競爭力意義重大,準確地檢測筍芽是實現機械化選擇性采收的首要問題。
在解決了壟面筍芽識別的基礎上,為了進一步解決因采收不及時筍尖變紫、品質下降的問題,針對壟面下筍尖頂土出現的土壤裂縫,研究團隊提出了一種輕量級的不可見筍芽(裂縫形態)識別模型。建立了田間環境下不可見筍芽圖像數據集,并通過模擬田間作業場景進行圖像增強變換;采用超參數進化方法確定基線網絡;在基線網絡中基于提取的筍芽特征圖引入線性分組變換和坐標注意力機制,降低模型的復雜性,提高對目標位置的敏感性;將測試時間增強方法引入到網絡推理中,以增強變化環境中目標識別的魯棒性。采用消融試驗和對比試驗分析了模型的性能,為其他與裂縫檢測有關的研究提供理論支持。
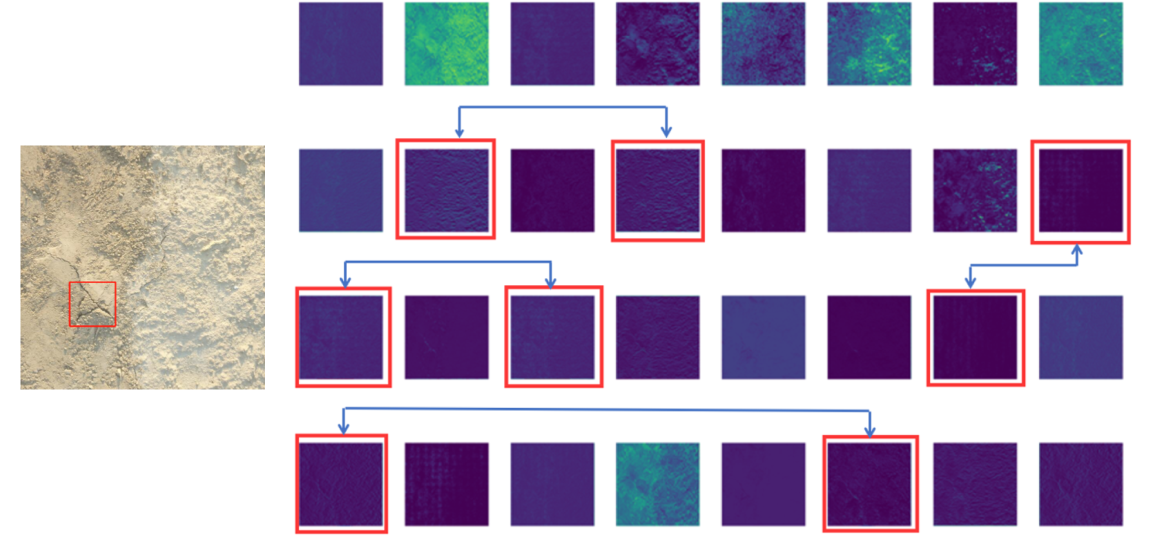
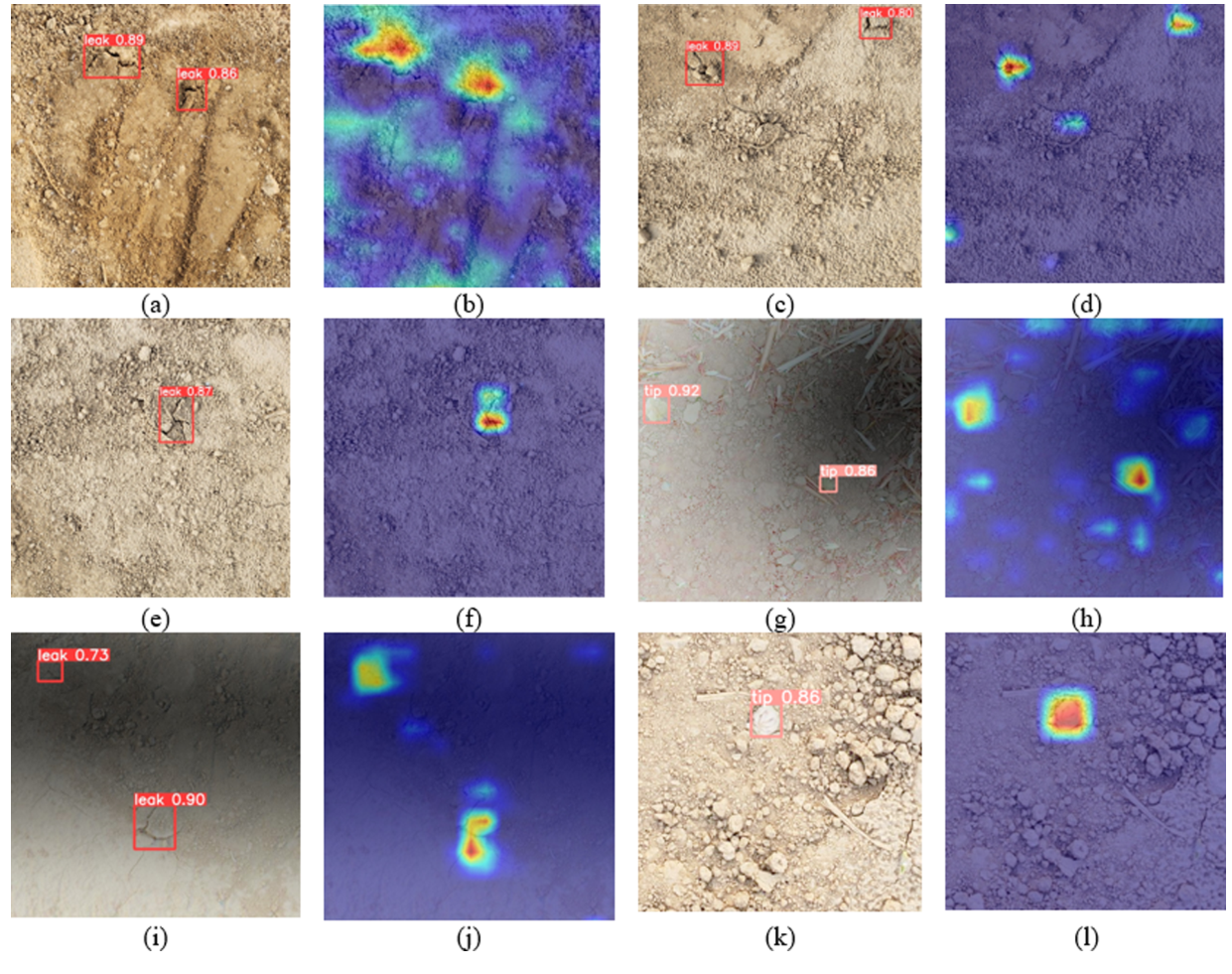
圖2.檢測的圖像和熱圖
該研究構建了選擇性采收機器人平臺,并進行了田間采收試驗,試驗結果驗證了視覺系統在白蘆筍選擇性收獲機器人中的有效性和可行性,突破了筍芽高速采收的瓶頸問題,為開發出智能化的選擇性白蘆筍采收機器人提供相關的技術支持。

圖3.白蘆筍采收試驗
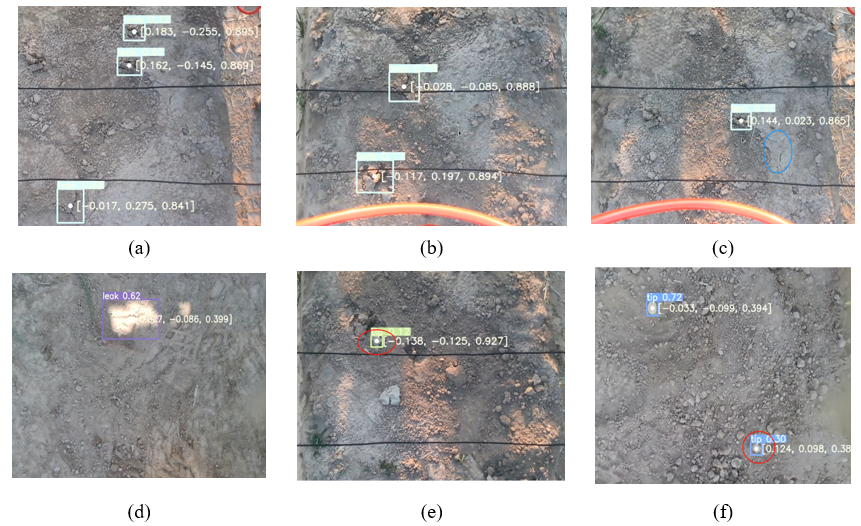
圖4.不同田間作業條件下的筍芽檢測
該研究得到了國家自然科學基金和山東省棉花產業技術體系的資助。
論文鏈接:https://doi.org/10.1016/j.compag.2024.108852
編 輯:萬 千
審 核:賈 波





