

近日,Engineering Applications of Artificial Intelligence在線發表了機械與電子工程學院劉平教授團隊題為Picking point localization method of table grape picking robot based on you only look once version 8 nano的研究論文。山東農業大學劉平教授為通訊作者,研究方向為農業機器人與智能輔助育種關鍵技術研究。山東農業大學博士研究生朱衍俊為第一作者,該論文獲得山東省重點研發計劃項目的資助。
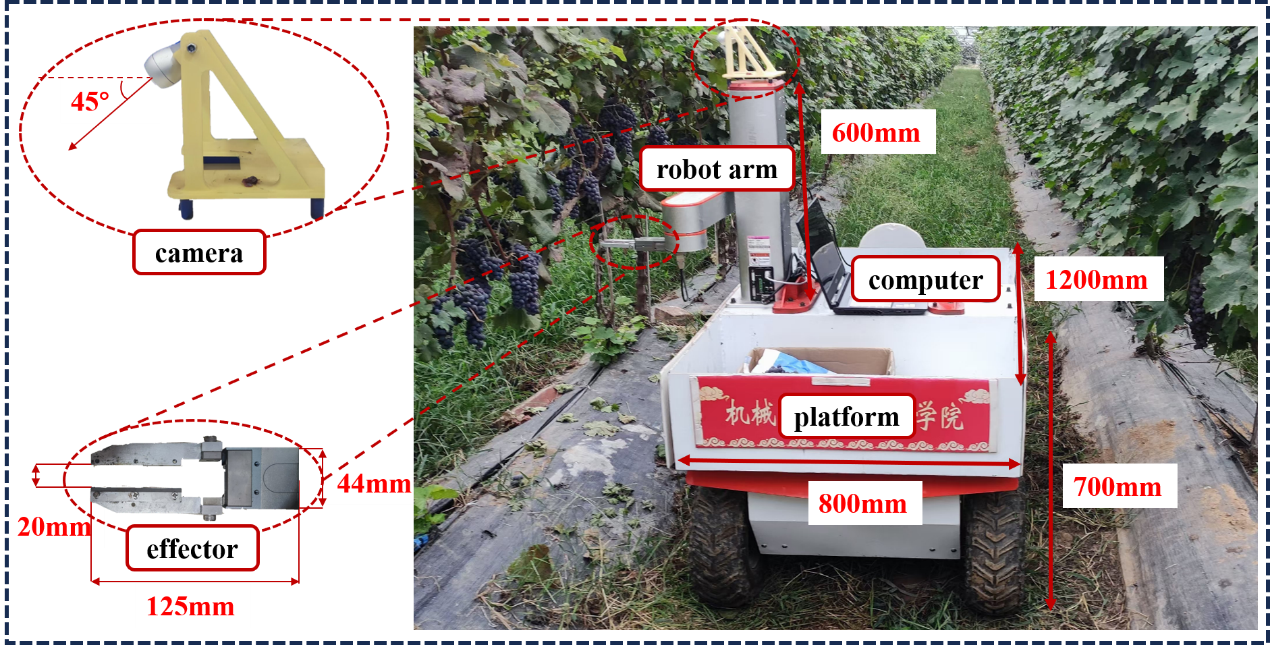
圖2 鮮食葡萄采摘機器人
鮮食葡萄的機械化、自動化采收是降低鮮食葡萄生產成本,提高生產效率的有效途徑,而傳統的人工采摘葡萄存在勞動強度大、效率低等問題,嚴重制約著鮮食葡萄生產的機械化與自動化,針對鮮食葡萄采摘機械化與自動化的生產需求,基于鮮食葡萄采摘機器人提出一種You Only Look Once version 8 nano-Deformable Convolutional Networks-Wise Intersection over Union-Fourth Detection Layer(YOLO v8n-DWF)網絡模型(如圖1),設計了鮮食葡萄采摘點定位方法,實現了鮮食葡萄采摘點的快速識別與準確定位。針對自然環境中低質量數據集以及小目標難檢測等問題,基于YOLOv8網絡模型,融合變形卷積網絡(DCN)模型、Wise-Intersection over Union version 3 (WIou v3)損失函數以及小目標檢測層,提出了YOLOv8-DWF網絡模型,試驗結果表明提出的YOLOv8n-DWF模型的檢測精度(Precision,P)、召回率(Recall,R)、平均精度均值(mean Average Precision,mAP)分別為97.9%、95.3%和97.6%,將其應用于鮮食葡萄采摘機器人(圖2),平均采摘成功率為87.40%,實現了鮮食葡萄的自動采摘,為鮮食葡萄的智機械化、自動化采摘提供了堅實的理論基礎。
編 輯:萬 千
審 核:賈 波





