
近日,機械與電子工程學院苑進教授團隊在《Computers and Electronics in Agriculture》發表題為“3MSP2: Sequential Picking Planning for multi-fruit congregated tomato harvesting in multi-clusters environment based on multi-views”的最新研究成果。機電學院博士研究生戴念祖為第一作者,苑進教授為文章唯一通訊作者,劉學美教授、方家明博士參與課題研究,我校為第一通訊單位。
作為世界上最重要的水果和蔬菜之一,番茄在全球蔬菜貿易市場中占有重要地位,每年都需要大量勞動力進行采收作業。然而,隨著人口老齡化,勞動力短缺現象逐漸加劇,導致在采收季節難以招募到足夠的工人。因此,亟需開發具有智能感知和選擇性收獲能力的采摘機器人,以解決收獲季節勞動力不足的問題,降低收獲成本,提高收獲效率。對于采摘機器人而言,高效、穩健和高成功率的抓取策略包括最佳采摘姿勢和最佳采摘序列。然而,現有的這些采摘姿態估計方法和采摘序列規劃方法并不能直接用于大果叢生番茄的采摘,因為使用這些方法做出決策的采摘機器人對特定環境下采摘任務的魯棒性較差,它們難以在叢生、無序和復雜的環境中自動確定采摘果實目標。特別是對于不同類型和采收方式的番茄植株,其生長狀態具有不確定性,空間相對位置和空間姿態也不盡相同。
針對以上技術難題,山東農業大學苑進教授團隊提出了一種新穎的番茄順序采摘規劃方法,稱為3MSP2(3M 表示多視角、多集群和多果實的應用場景,SP2 表示順序采摘規劃),用于多集群環境下的多果實集中采摘,以提高機器人采摘效率并減少末端執行器對相鄰果實造成的損壞。
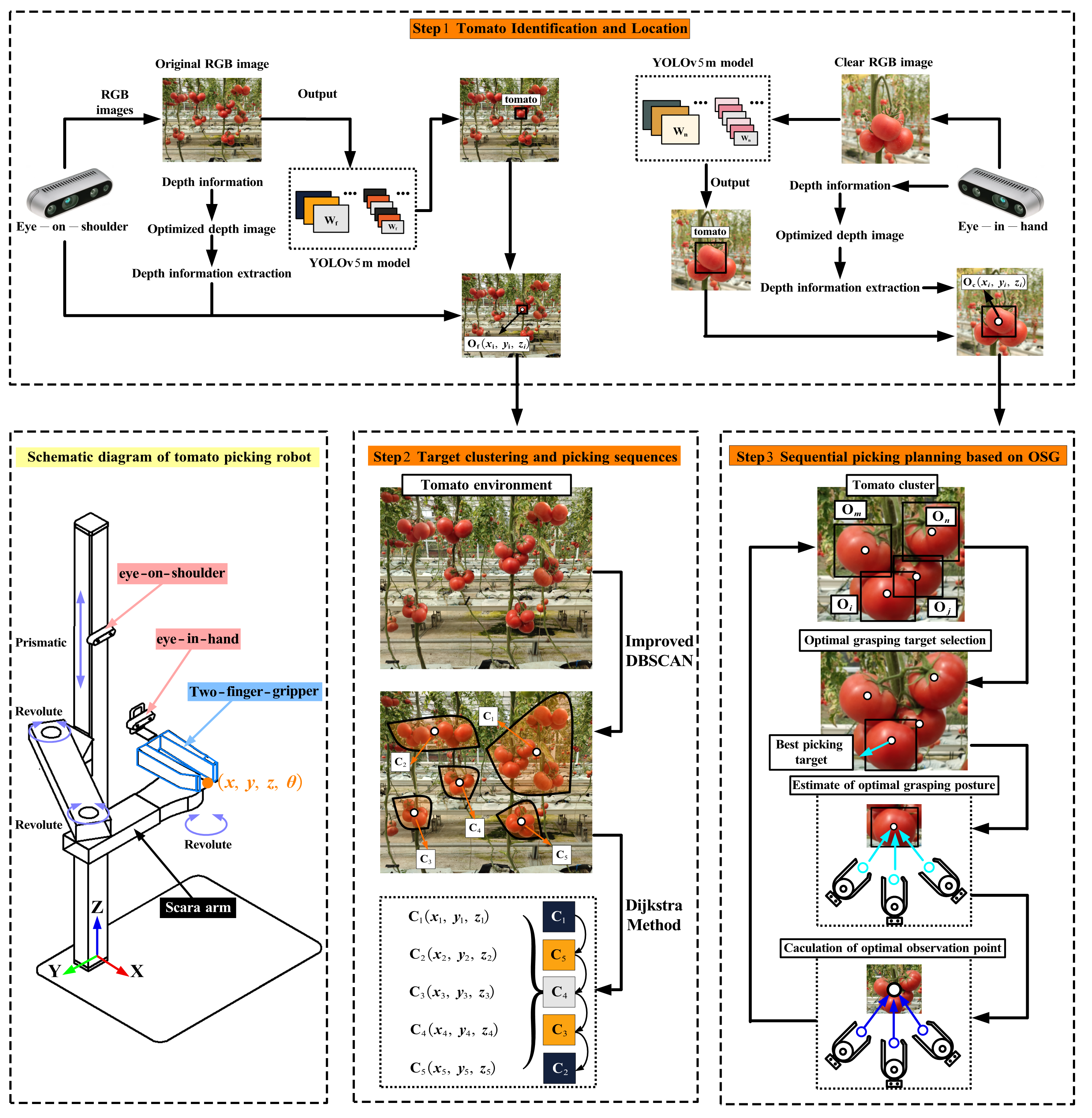
圖1. 3MSP2方法工作流程
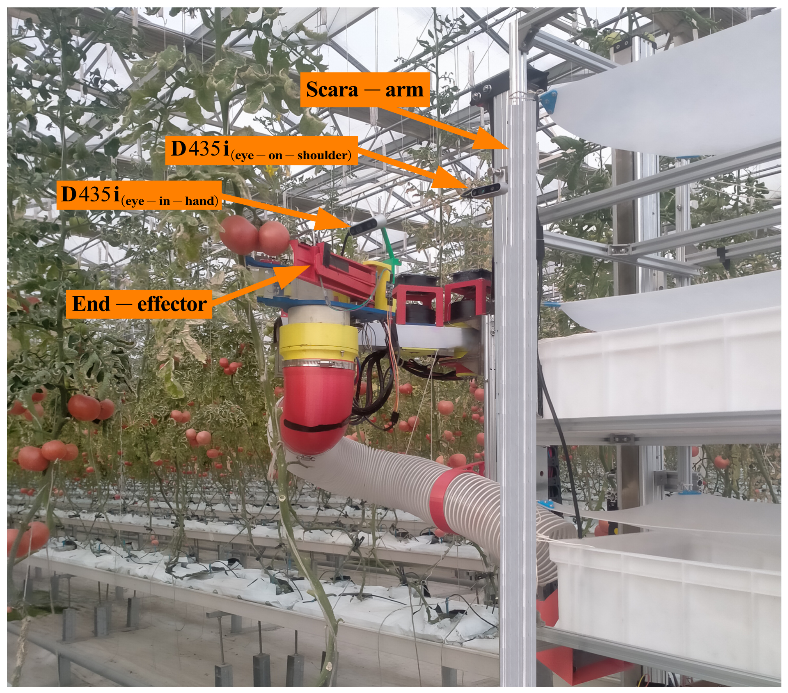
圖2. 番茄采摘機器人試驗平臺
該研究得到了山東省重大科技創新工程項目、國家自然科學基金和山東省棉花產業技術體系的資助。
論文鏈接:https://doi.org/10.1016/j.compag.2024.109303
編 輯:萬 千
審 核:賈 波

