
近日,機電學院苑進教授團隊《Computers and Electronics in Agriculture》在線發表了題為“S2CPL: A novel method of the harvest evaluation and subsoil 3D Cutting-Pointlocation for selective harvesting of green asparagus”的研究論文。研究生牟思為該論文的第一作者,苑進教授為該論文的通訊作者。
蘆筍是一種多年生宿根性草本植物,在20世紀80—90年代中國已成為世界上栽培面積最大的蘆筍生產國和產品出口國,面臨著收獲綠蘆筍的挑戰。蘆筍生長密集,同一根系生長出來的蘆筍嫩芽生長方向、生長成熟不一致,具有快速、零星生長的特點。目前全國幾乎所有蘆筍采摘等繁重的體力勞動仍由農民人工完成,綠蘆筍的采收需要根據其長度仔細選擇成熟的莖,另一方面,我國蘆筍一般生長在山脊上,需要用蘆筍刀在地表以下1至2cm的深度人工切割,因此這是一項勞動密集型和耗時的工作。實現田間綠蘆筍智能選擇性采收的關鍵在于采收適應度(長度、直徑等)的判別和綠蘆筍底土切點的精確定位。
針對以上技術難題,山東農業大學苑進教授團隊以大田種植的綠蘆筍為研究對象,首創了S2CPL綠蘆筍選擇性采收過程中采收適宜性評價和土下切割點精確定位的關鍵方法。該方法利用RGB-D傳感器獲取綠蘆筍的圖像和空間深度信息,對YOLOv8的實例分割算法進行了研究和改進提高分割精度,同時提出了一種利用圖像掩模融合深度信息計算綠蘆筍長度和直徑的三維形態提取方法,最終實現了機器人選擇性采收的收獲評價和圖下三維切割點定位。該項研究還建立了一種為機械化采收末端執行器提供目標點信息的相機位姿優化方法。該技術有望為提高綠蘆筍選擇性采收中的視覺定位系統提供重要核心技術,實現成熟綠蘆筍自動化、智能化采收,促進綠蘆筍產業的發展。
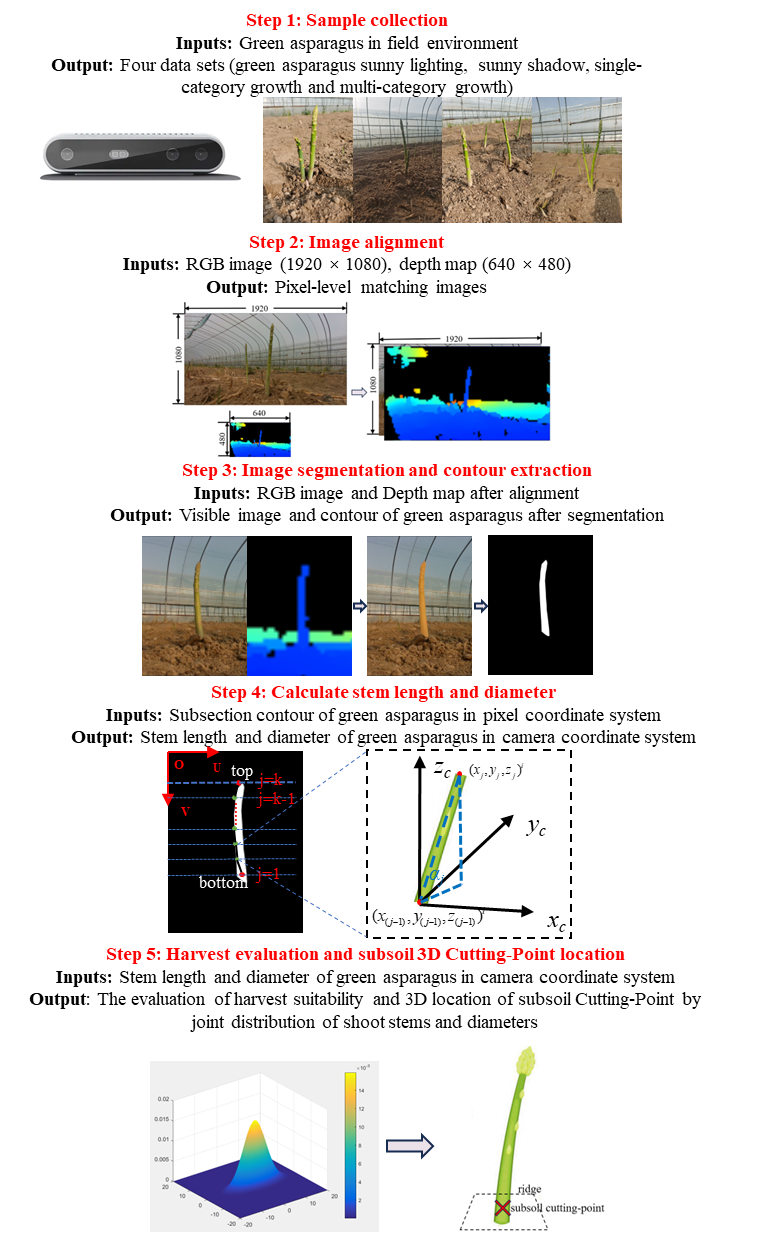
圖1. S2CPL模型的工作流程
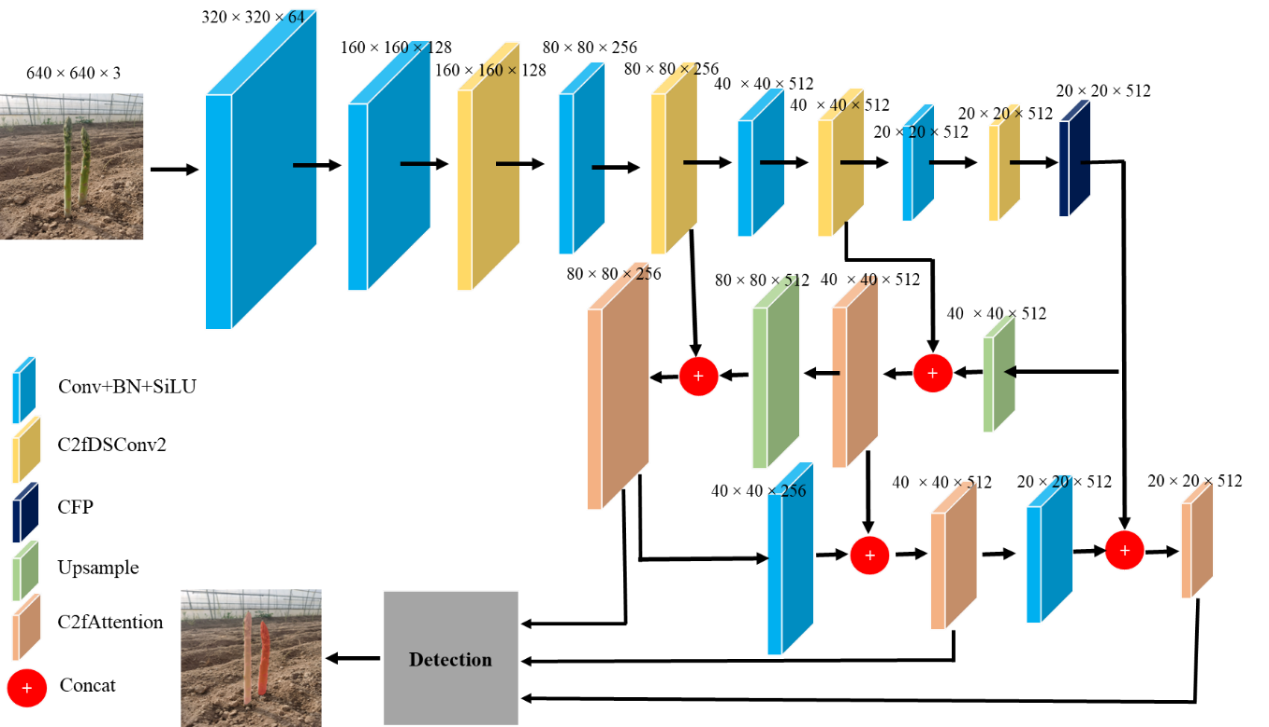
圖2. S2CPL模型結構
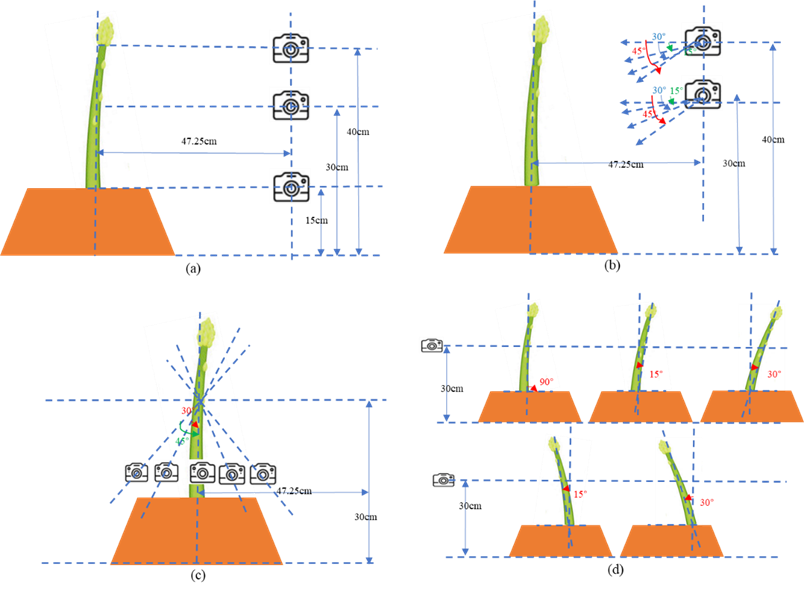
圖3. 相機姿態優化方案
該研究得到了國家自然科學基金和山東省棉花產業技術體系與產業創新團隊項目的資助。
論文鏈接:https://doi.org/10.1016/j.compag.2024.109316
編 輯:萬 千
審 核:賈 波

